


What are you torque(ing) about? Rally driving is not only thrilling to watch, it also has real-world applications. Forget Formula One – all that’s ever given us is flappy-paddle gearboxes. Rallying has given us all-wheel drive, turbocharging, all-terrain tyres and torque vectoring.
Torque vectoring might not be a common term, but it has been around for a while. It’s one of the many reasons Mitsubishi was able to win so many rallies back in the late 90s. More importantly, it’s not one of those systems we hear the commentators speaking about, and hardly ever see it on actual cars we can buy. Torque vectoring can currently be found on both sides of the SUV spectrum. The Nissan Juke has it, as does Volvo’s new XC90. Even some models in the Hyundai Tucson range have it.
What’s with torque?
Before we get to the vectoring, let’s start with a reminder about what torque is. We could delve into the mathematical explanation, but since that involves complicated formulas and weird symbols, let’s rather stick to the layman’s terms and an easy explanation that seems to be the norm when broaching this particular topic. Torque is measured in pound-feet (or Newton metres in our metric set-up) and this figure tells us how much twisting force is at work. We’ll use the US and Europe metric system of pound-feet to explain torque, as it lends itself to an easier example to describe torque.
Imagine a construction worker with a pipe and a wrench. The wrench is attached to the pipe and the force needed to rotate that pipe is torque. If the wrench is four feet in length, and the plumber can apply 30 pounds of pressure to said wrench, the torque (pounds x feet) applied is 120 pound-feet of torque, which is 160Nm.
Torque is also the stuff that gets the car going from a standstill. It comes into play when overtaking, or when you’re towing a caravan. Needless to say, it’s the real hero of the motoring fraternity and rightfully deserves more praise than horsepower.
Torque vectoring
To get to torque vectoring, we need to look at the differential the above-mentioned torque travels through to get to the wheels. An all-wheel-drive vehicle (soft-roaders) will likely have a centre differential, which is needed to split the engine torque in two. This allows the front and rear axle to spin at different speeds, in other words, the wheels can rotate independently between the front and rear axle.
There are many upsides to all-wheel drive, which is why it caught on so quickly in rallying. The day Audi’s Quattro four-wheel-drive system made its rally debut, it immediately changed the rally game, and Audi became virtually unbeatable until other manufacturers also went the four-wheel-drive route.
It was then put into Audi’s road cars, but there was a bit of a problem. While you can split the power between the front and rear axle, the power between the two wheels on that axle remains the same. Each wheel follows its own unique path, so even if the power can be split between the front and rear axle, you’re still left with a front axle with two wheels that will receive the same wallop of power.
That’s why open differentials exist – to let the wheels on either side spin freely, without the driver having to worry about losing control.
But then some bright spark at Mitsubishi had another idea. What if we can control the speed difference between the wheels front to back, and left to right? That’s where torque vectoring comes in. This system uses a host of information provided by the various sensors throughout the car. It measures the angle of the steering, yaw, speed and throttle input. This information is then used by the electronic control unit, which decides to limit the power to one wheel while feeding power to the other.
A torque vectoring system works in two different ways. One system uses electronically controlled clutches, while the other uses the vehicle’s braking system. The braking system route is more common, simply because it’s cheaper. The system simply brakes the inside wheel during a turn, which means more power is sent to the outside wheel. This system has no real off-road application, unless you want to drive like a bat out of hell on a gravel road. It does mean, however, that SUVs like the BMW X5M and Porsche Macan can turn into a corner like a thoroughbred hot hatch.
Quattro with sport differential: operating principle
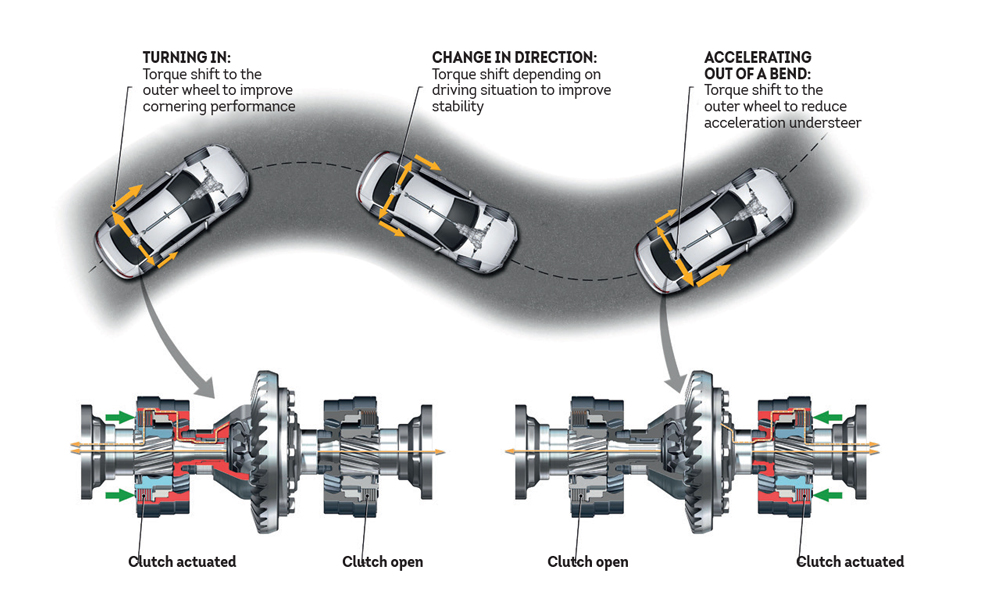
A vehicle with torque vectoring in a right hand corner. The inner wheel is braked, while the outer wheel receives more power. The result is a smoother turn-in and added traction.
The future of torque vectoring
Torque vectoring will definitely be part of the future of all shapes of vehicles, whether we like it or not. It can either make a car faster, or it can be used to make it more environmentally friendly. The new all-wheel-drive Ford Focus RS features a GKN Driveline system that uses a combination of new gearing ratios and control algorithms to vector torque between the rear wheels. It does so by over-speeding the rear wheels independently.
This means it can turn in faster, but it also allows you to be a hooligan in relative safety. The RS comes with a Drift Mode, which is actually just the all-wheel-drive system delivering more power to the rear wheels, while torque vectoring helps you achieve a drift and then maintain it. On the green side, we have GKN’s Twinster set-up uses the technology from plug-in hybrid systems, as well as the performance system mentioned above. It features a 60kW electric motor with 240Nm of torque through a 1:10 reduction gear. A system of clutches distributes the power to each wheel according to how much grip it has on the road surface. This means it uses no engine power, but it still has the ability to feed power to either the left or right wheel. The performance potential is astounding, not to mention the savings at the pump.







